PhD in Computer Science, Artificial Intelligence concentration • September 2021
M.S. in Computer Science • June 2017
B.S. in Computer Engineering, Magna Cum Laude • May 2015
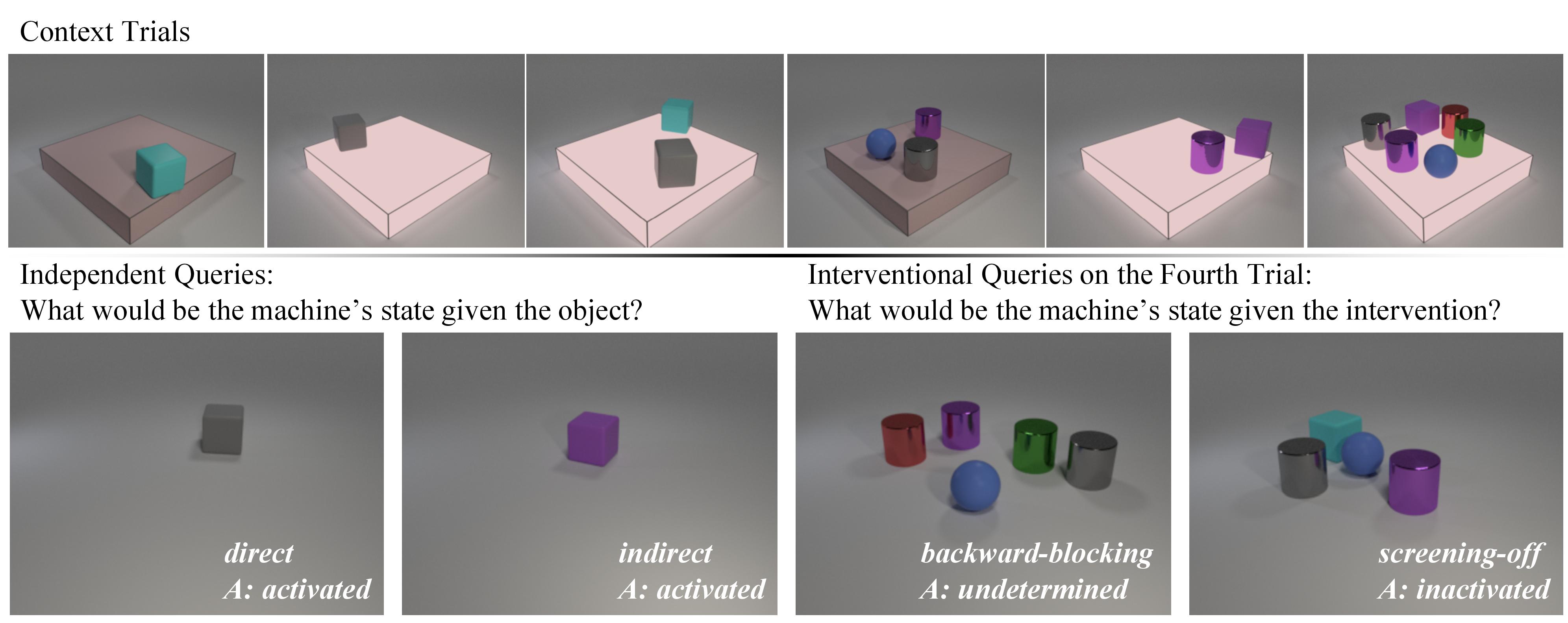
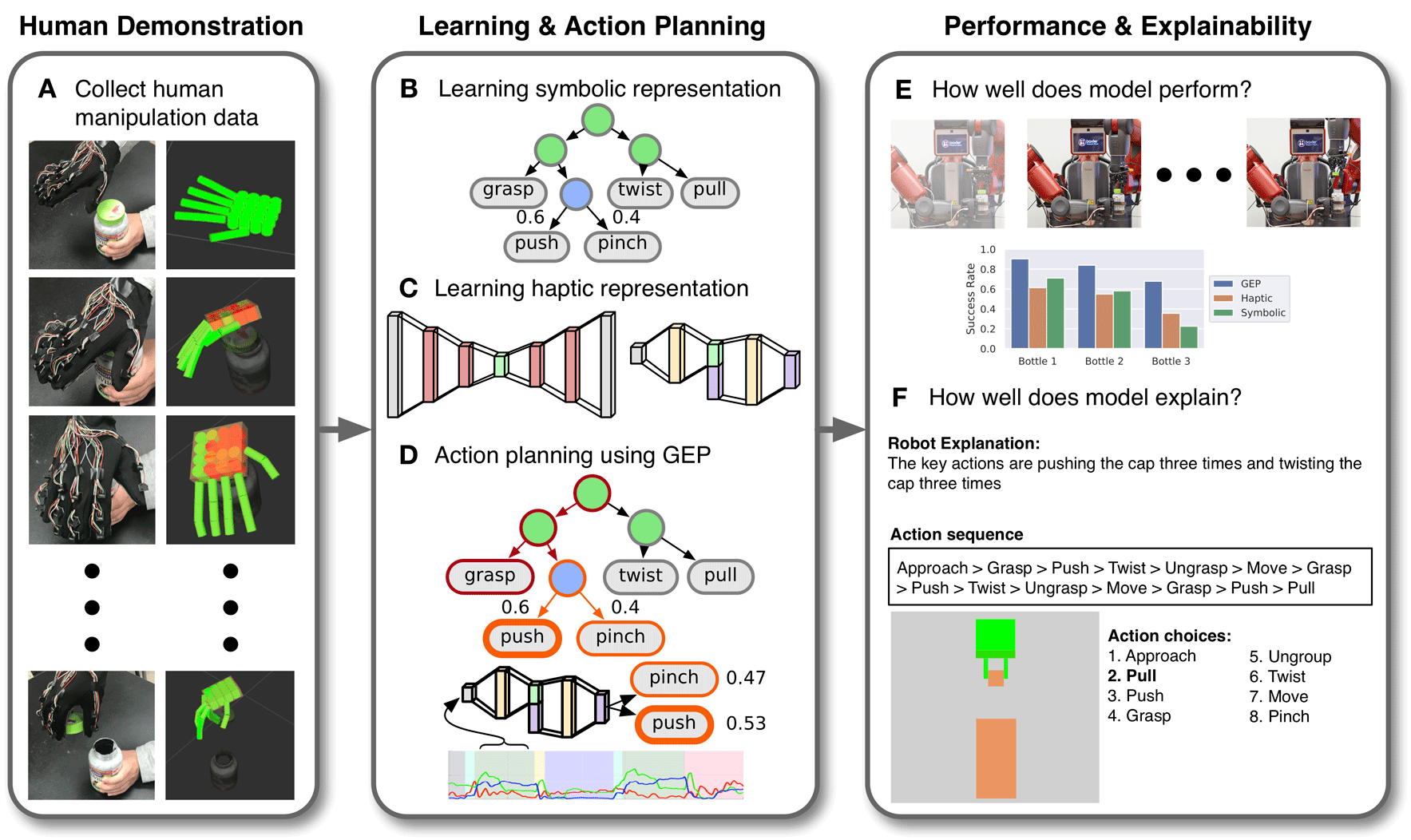
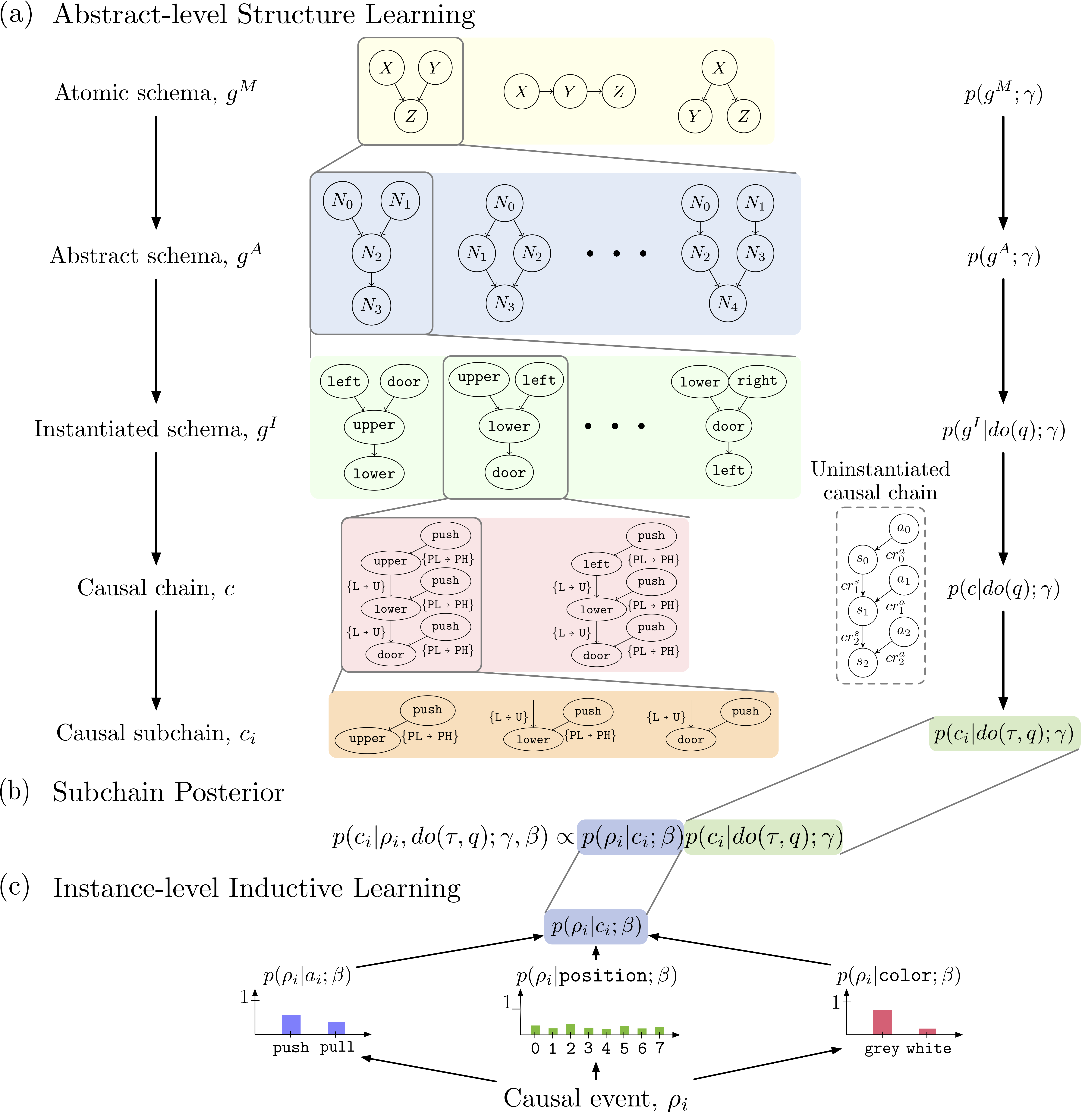
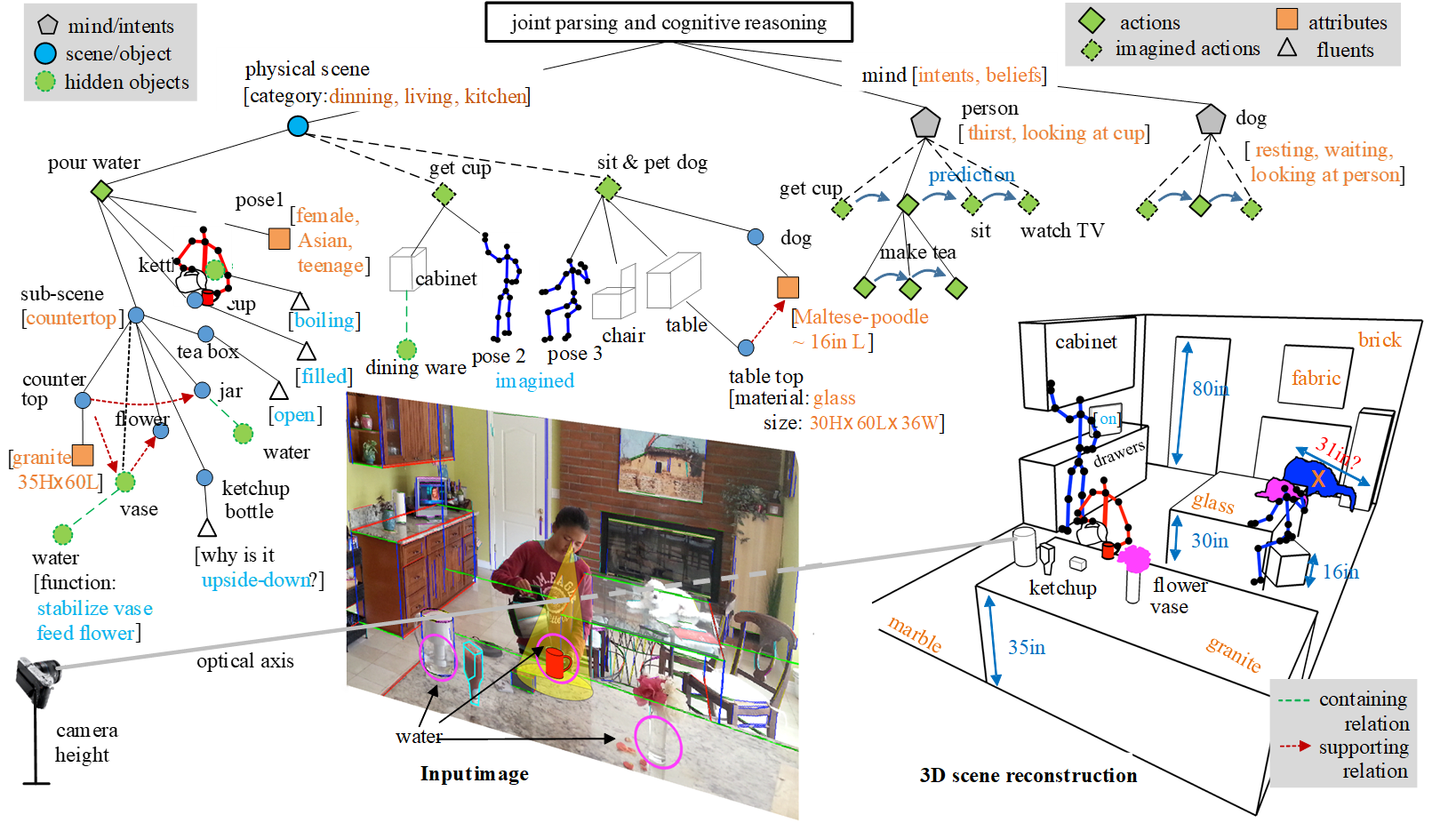
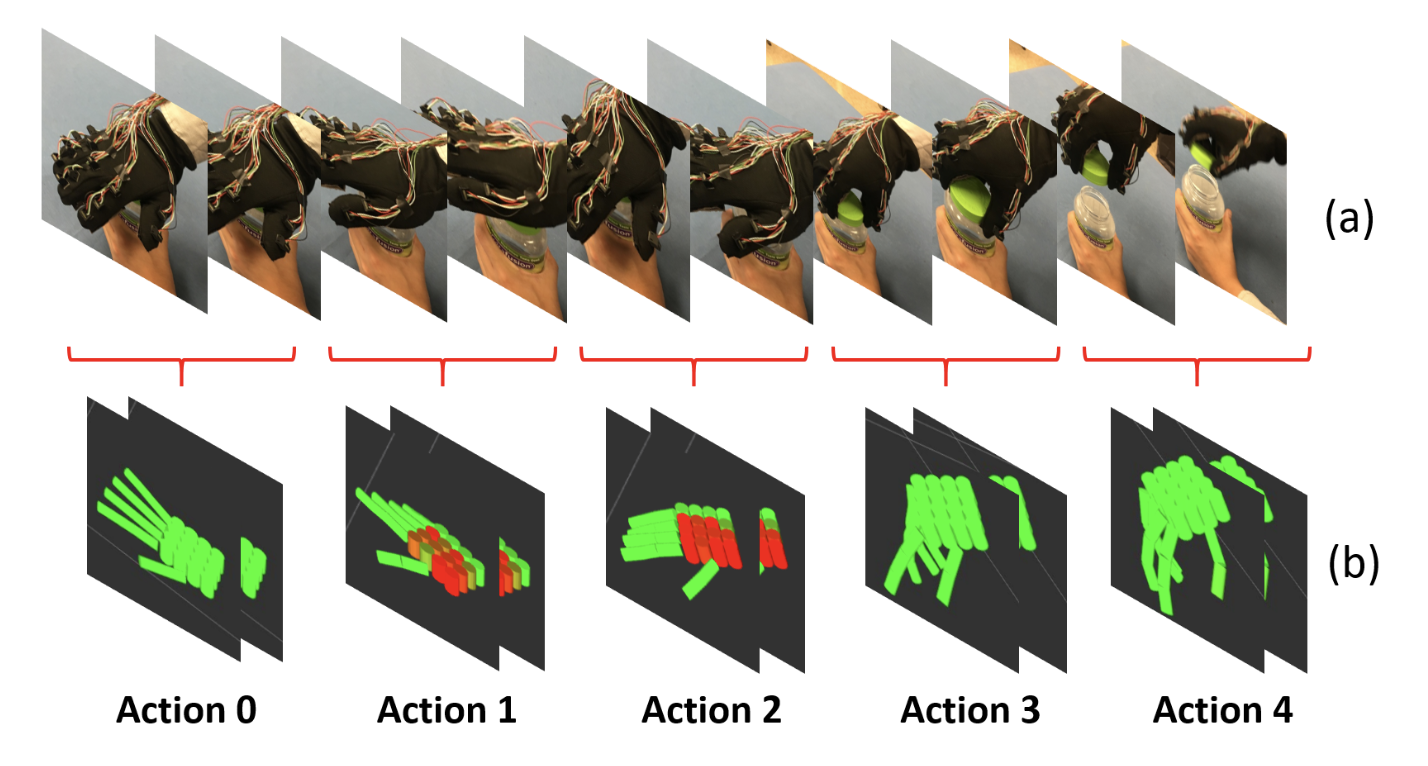
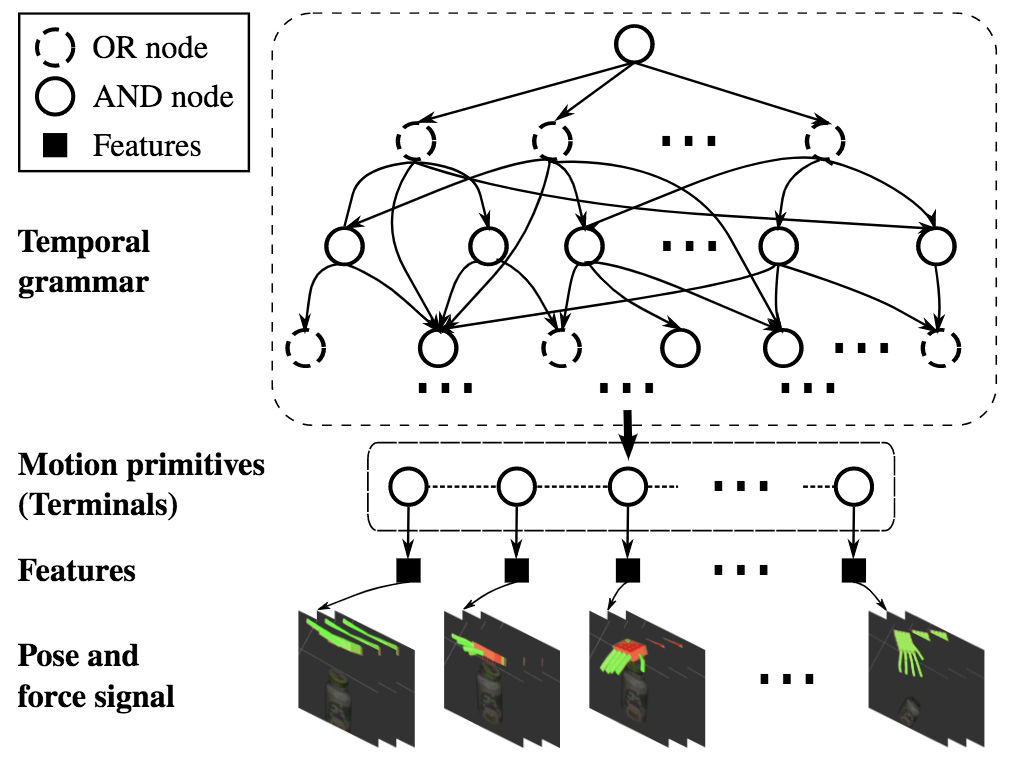
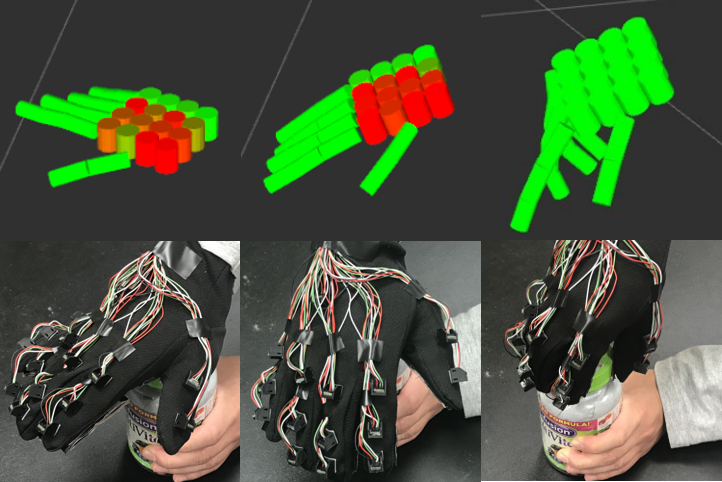
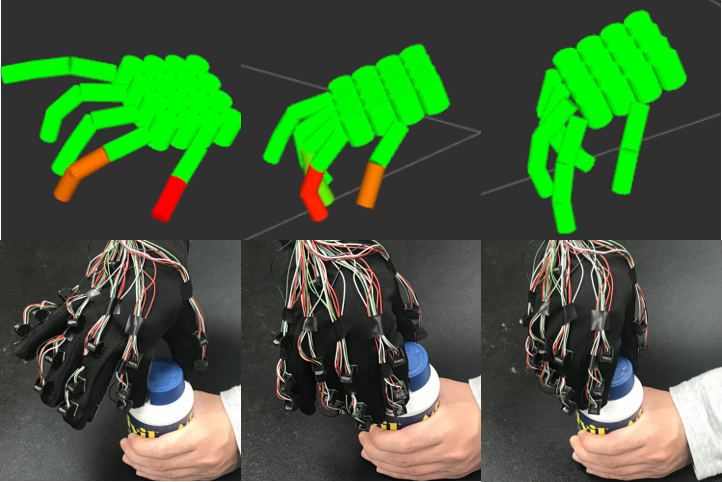
Humans build generalizable and explainable representations of their environment through interaction, observation, imitation, intervention, and language. The following research produced from a collaborative, team-based lab explores how artificial agents can use these five concepts to learn robust and transferable representations of tasks and environments.
Center for Vision, Cognition, Learning, and Autonomy, UCLA• Mar 2018 - Present

Center for Vision, Cognition, Learning, and Autonomy, UCLA• Feb 2018 - Dec 2019

Center for Vision, Cognition, Learning, and Autonomy, UCLA• Feb 2017 - Feb 2020
Center for Vision, Cognition, Learning, and Autonomy, UCLA• December 2015 - Feb 2017
Wright Patterson Air Force Base, University of Dayton• January 2014 - September 2015


University of Dayton Senior Design Project• August 2014 - May 2015
Science Robotics, Volume 7, Issue 68, 2022

UCLA Dissertation
Engineering 2020
Science Robotics, Volume 4, Issue 37, 2019
Proceedings of the AAAI Conference on Artificial Intelligence (AAAI), 2020
41st Annual Meeting of the Cognitive Science Society (CogSci), 2019
IEEE Transactions on Parallel and Distributed Systems (TDPS), March 2019
40th Annual Meeting of the Cognitive Science Society (CogSci), 2018
International Conference on Robotics and Automation (IRCA), 2018
International Conference on Intelligent Robots and Systems (IROS), 2017
International Conference on Intelligent Robots and Systems (IROS), 2017
Software Engineering, Artificial Intelligence, Networking and Parallel/Distributed Computing (SNPD), 2015
Aerospace and Electronics Conference (NAECON), 2015.
Center for AI and Robot Autonomy (CARA)• Mar 2021 - Present
Santa Monica College• June 2016 - Present
Center for AI and Robot Autonomy (CARA)• June 2018 - Mar 2020
Computer Science Department, UCLA• September 2015 - June 2016
Electric & Computer Engineering Department, University of Dayton• January 2015 - May 2015
Garmin International• May 2013 - August 2013
School of Engineering, University of Dayton• September 2012 - May 2015
Cristo Rey Kansas City• May 2011 - August 2012
If you have any questions about me, my research interests, or my work, please reach out. Interesting thoughts from interesting people are always welcome. mark@mjedmonds.com